Commons:Featured picture candidates/Set/Line scan photo of Shinkansen N700A Series Set G13 in 2017
Line scan photo of Shinkansen N700A Series Set G13 in 2017, featured edit
Voting period is over. Please don't add any new votes.Voting period ends on 3 Oct 2017 at 08:46:37 (UTC)
-
 1
1 -
 2
2 -
 3
3 -
 4
4 -
 5
5 -
 6
6 -
 7
7 -
 8
8 -
 9
9 -
 10
10 -
 11
11 -
 12
12 -
 13
13 -
 14
14 -
 15
15 -
 16
16
















 Info created by dllu - uploaded by dllu - nominated by dllu -- dllu (t,c) 08:46, 24 September 2017 (UTC)
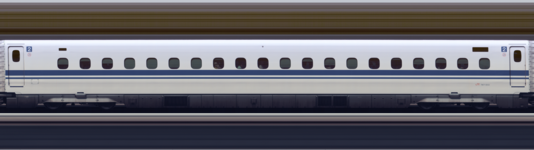
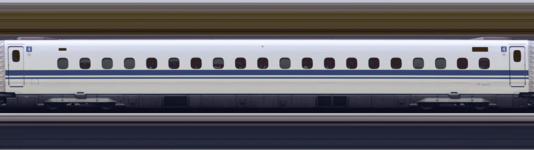
Info created by dllu - uploaded by dllu - nominated by dllu -- dllu (t,c) 08:46, 24 September 2017 (UTC)- Info Since the entire picture is almost 100,000 pixels wide and cannot be displayed by most browsers, I've split the photo into 16 (one per car). They fit together seamlessly. The train only took 5 seconds to pass by. dllu (t,c) 08:46, 24 September 2017 (UTC)
 Support -- dllu (t,c) 08:46, 24 September 2017 (UTC)
Support -- dllu (t,c) 08:46, 24 September 2017 (UTC)- Support for being simply bowled over by this. A high-tech train caught with high-tech photography. This is a good example of when this technique really comes in handy. Photographing the whole length of such a train (with such detail) any other way would require a lot of work. I might also add that the way you display all the photos here is very clever. At first I didn't realize that I was in fact looking at 16 photos when I tugged the slider in the nomination. :) --cart-Talk 10:39, 24 September 2017 (UTC)
- Btw, which way is the train going here, i.e. which end of it is acting as locomotive in this shot? --cart-Talk 13:28, 24 September 2017 (UTC)
- The train was travelling from left to right in this picture. Like most (all?) high speed trains, the N700A series is an electric multiple unit. Rather than having a single locomotive, the motors are distributed along the entire length of the train. dllu (t,c) 17:18, 24 September 2017 (UTC)
- Not all high speed trains I think (see the French high speed trains). - Benh (talk) 20:18, 28 September 2017 (UTC)
- All TGV are electrical multiple units. See: w:Category:SNCF multiple units. From w:SNCF TGV Sud-Est, "Each set is made up of two power cars and eight carriages (capacity 345 seats), including a powered bogie in each of the carriages adjacent to the power cars." The motors may not be uniformly distributed along every car, but it is a multiple unit in the sense that several cars, including some passenger carriages, have motors. The w:AGV_(train) will have more power bogies along the train length. That said, I looked around and it seems that the w:British Rail Class 43 (HST) is in service on a few lines at 200 km/h, technically making it a high speed train. So, I suppose not all high speed trains are EMUs. dllu (t,c) 20:54, 28 September 2017 (UTC)
- :) Interesting. OK I was thinking "of course if there are two power cars, then it's a EMU". But I was wondering with a colleague (a little interested in trains as well) if the two of them were "active" or if only the head one was. I thought the latter so on the principle, I'd have said "single EU". Just found that the two power car are active at the same time anyways. Should have checked before, but thanks. - Benh (talk) 21:24, 28 September 2017 (UTC)
- Support as per Cart. Wow! Yann (talk) 11:36, 24 September 2017 (UTC)
- Support per Cart. Just... wow! --Gyrostat (talk) 13:26, 24 September 2017 (UTC)
- Support --Karelj (talk) 13:31, 24 September 2017 (UTC)
- Support Didn't know about that. That's interesting tech (and here interesting application) imo. - Benh (talk) 15:32, 24 September 2017 (UTC)
- Support -- Johann Jaritz (talk) 15:36, 24 September 2017 (UTC)
- Support -- KTC (talk) 18:09, 24 September 2017 (UTC)
- Support per everyone. -- Ikan Kekek (talk) 20:18, 24 September 2017 (UTC)
- Support --Cayambe (talk) 20:37, 24 September 2017 (UTC)
- Support --Martin Falbisoner (talk) 07:51, 25 September 2017 (UTC)
- Support —Bruce1eetalk 08:04, 25 September 2017 (UTC)
- Support Would work well on the wall of a transport museum. -- Thennicke (talk) 08:23, 25 September 2017 (UTC)
- Support--Peulle (talk) 15:13, 25 September 2017 (UTC)
 Question What about a picture you cannot open at full size ? How to see the stitching errors if any ? How to be sure it is not a repetitive pattern of the same car ? Only questions. This is a very spectacular picture and a wonderful idea.--Jebulon (talk) 16:09, 25 September 2017 (UTC)
Question What about a picture you cannot open at full size ? How to see the stitching errors if any ? How to be sure it is not a repetitive pattern of the same car ? Only questions. This is a very spectacular picture and a wonderful idea.--Jebulon (talk) 16:09, 25 September 2017 (UTC)
- You can check here here. But this is no stitching, very unlikely to have error. - Benh (talk) 18:02, 25 September 2017 (UTC)
- Jebulon, Benh and those of you who were not here the previous time we had such a photograph, please see my explanation of how this is done here. --cart-Talk 18:21, 25 September 2017 (UTC)
{kind=link}
- Support Amazing! One can even see the people sitting inside the train. --Shihir 16:38, 25 September 2017 (UTC)
- Support Whooooooooshwhooshwhooshwhooshwhoosh ... and so forth. Daniel Case (talk) 17:50, 25 September 2017 (UTC)
- Question Out of curiosity... How does the speed of the subject affect the capture? I believe verticals are affected a little here. Also, do you have to input the speed of the subject at a given moment, or does the thing work like magic? - Benh (talk) 18:02, 25 September 2017 (UTC)
- The speed changes the "aspect ratio". Slow objects are stretched horizontally and fast objects are compressed. I only scaled to make sure the train's proportions are correct. The train is moving at a nearly constant speed and its speed cannot possibly change much during the 5 seconds it took to capture this image. As for the slightly slanted verticals, it can be caused by a tilted camera (although I tried my best with a bubble level), or the fact that the camera is rotated about the yaw axis slightly to the right, and the sides of the train are slightly sloped. This can be corrected digitally using a shear transform, but I don't think it's necessary and re-processing the whole thing is quite time consuming due to the large size of the image. dllu (t,c) 18:12, 25 September 2017 (UTC)
- Thank you for ur answer. I thought if you input the speed in a dedicated software which would work on raw data, the thing would set the "aspect ratio" accordingly (if I were the camera maker, I would provide this possibility). As for the verticals, I was thinking this could be because the thing scans from top to bottom (or the opposite but it doesn't matter). While this shouldn't affect slow moving subject, this should definitely affect fast subject like this train. I also thought software would fix this (if I were the camera maker... :) ). - Benh (talk) 18:21, 25 September 2017 (UTC)
- It does not scan from top to bottom. Each line is read out simultaneously. I prefer to scan as fast as possible, do all postprocessing, and then scale the image to the right proportions. Scaling the image should always be done as the last step. This way, we can oversample, resulting in less noise and generally better image quality. I actually wrote some scripts to improve image quality. See: [1] (from top to bottom: unprocessed output, odd/even pixel normalization, pixel crosstalk mitigation, black point compensation). dllu (t,c) 18:39, 25 September 2017 (UTC)
- That is quite interesting. I can't check everything in details, but this is implying the camera doesn't come with a proper set of tool/soft to make the most of the raw output, and that you work heavily on them with ur homemade scripts. Congrats for the work. It's very interesting, and the result is incredible and worth the pain. - Benh (talk) 19:09, 25 September 2017 (UTC)
- It's a bit sad though if the camera doesn't let u alter the speed of the capture, so there's no unnecessary sampling between raw data and final output. Even if you don't know the exact speed, just imputing a rough estimation at capture time should greatly improve quality. - Benh (talk) 19:13, 25 September 2017 (UTC)
- The camera does let you change the speed of capture, but as I mentioned, it's better to capture as fast as possible and then scale it down later. It gives better image quality this way. dllu (t,c) 20:14, 25 September 2017 (UTC)
- Now I understand what u meant with "scan as fast as possible". Totally agree with u: capture as fast as possible so you have the "longest aspect ratio" first. Thanks again for sharing some interesting details. - Benh (talk) 04:47, 26 September 2017 (UTC)
![[1]](https://daniel.lawrence.lu/sc/testls.png){kind=link}
- Support --fedaro (talk) 00:10, 26 September 2017 (UTC)
- Support Very unusual nom, well done! -- King of ♥ ♦ ♣ ♠ 02:04, 26 September 2017 (UTC)
- Support Convinced.--Jebulon (talk) 08:23, 26 September 2017 (UTC)
- Support --Mile (talk) 09:27, 26 September 2017 (UTC)
- Support -- -donald- (talk) 12:28, 26 September 2017 (UTC)
- Support Wow --LivioAndronico (talk) 19:43, 26 September 2017 (UTC)
- Support Never seen longer picture than this one... Nice! -- Pofka (talk) 19:01, 28 September 2017 (UTC)
- Support wow indeed, and a technique/camera I don't think I've come across yet. Time to do some research, I think. :) — Rhododendrites talk | 01:58, 29 September 2017 (UTC)
- Support --CEphoto, Uwe Aranas (talk) 07:19, 2 October 2017 (UTC)
 Comment I'm trying to fix the closing post-closing now. --Cart (talk) 11:50, 11 June 2018 (UTC)
Comment I'm trying to fix the closing post-closing now. --Cart (talk) 11:50, 11 June 2018 (UTC)
Confirmed results:
This image will be added to the FP gallery: Objects/Vehicles/Land vehicles#Rail vehicles