File:Distributed-Cerebellar-Motor-Learning-A-Spike-Timing-Dependent-Plasticity-Model-Video3.ogv
Size of this JPG preview of this OGG file: 800 × 450 pixels. Other resolutions: 320 × 180 pixels | 640 × 360 pixels | 1,280 × 720 pixels.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Original file (Ogg multiplexed audio/video file, Theora/Vorbis, length 1 min 39 s, 1,280 × 720 pixels, 543 kbps overall, file size: 6.37 MB)
Captions
Captions
Add a one-line explanation of what this file represents
Summary
edit| Description |
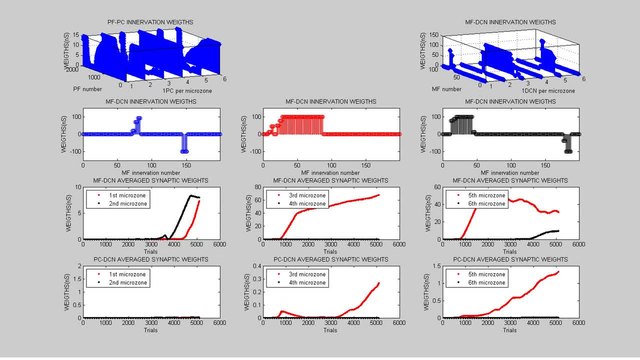
English: Learning simulation. Synaptic weight evolution during Case B study is plotted. Simulations were run using plasticity mechanisms at PF–PC, MF-DCN, and PC-DCN along 10,000 trials. PF–PC synaptic conductances were set to an initial value of 5 nS, MF-DCN and PC-DCN initial conditions started from zero. Only one every 100 trials is shown. (Top left) Sagittal axis 3D view of the synaptic weight distribution at PF–PC synapses. (Top right) Sagittal axis 3D view of the synaptic weight distribution at MF-DCN synapses. (Second row plots) Evolution of the averaged gains at MF-DCN synaptic weights from the first to sixth micro-complex. Each micro-complex supplies an agonist (red line) or antagonist (black line) cerebellar corrective action in each robot joint. The error curve to be corrected is the difference between controlled (robot actual position and velocities) and reference variables (desired position and velocities). (Third row plots) Evolution of the averaged gain at PC-DCN synaptic weights from the first to sixth micro-complexes. Each micro-complex supplies an agonist (red line) or antagonist (black line) cerebellar corrective action at its corresponding robot joint. |
||
| Date | |||
| Source | Movie S3 from Luque N, Garrido J, Naveros F, Carrillo R, D'Angelo E, Ros E (2016). "Distributed Cerebellar Motor Learning: A Spike-Timing-Dependent Plasticity Model". Frontiers in Computational Neuroscience. DOI:10.3389/fncom.2016.00017. PMC: 4773604. | ||
| Author | Luque N, Garrido J, Naveros F, Carrillo R, D'Angelo E, Ros E | ||
| Permission (Reusing this file) |
This file is licensed under the Creative Commons Attribution 4.0 International license.
|
||
| Provenance |
|
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 03:07, 15 March 2016 | 1 min 39 s, 1,280 × 720 (6.37 MB) | Open Access Media Importer Bot (talk | contribs) | Automatically uploaded media file from Open Access source. Please report problems or suggestions here. |
You cannot overwrite this file.
File usage on Commons
The following page uses this file: